Organized by:
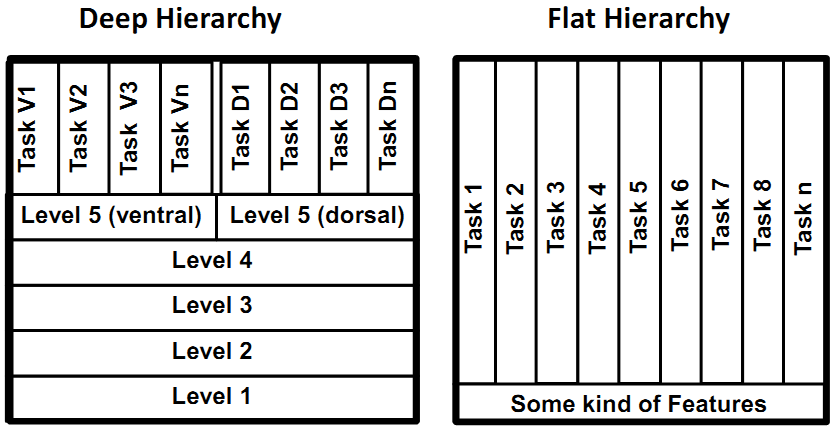
Ales Leonardis, Norbert Krüger, Frank Guerin, Sinan Kalkan, Nicolas PugeaultProcessing in the brain in general and visual processing in particular is organized in a hierarchical fashion, from simple localized features to complex, large scale features. The visual system consists of a hierarchy, in which neurons in early visual areas extract simple image features (orientation, motion, disparity) over a small local region of visual space, which are then transmitted to neurons in higher visual areas responding to more complex features (e.g. shape) over a larger region of visual space. Hierarchical representations can derive and organize features at multiple levels. Hierarchical representations with many levels are called 'deep hierarchies'. They build on top of each other by exploiting the shareability of features among more complex compositions or objects themselves. Sharing features, on the one hand, means sharing common computations, which brings about (highly desirable) computational efficiency. On the other hand, reusing the commonalities between objects’ models places their representations in relation to other objects, thus leading to high generalization capabilities and lower storage demands.
However, although all neurophysiologic evidence suggests that in the human visual system quite a number of levels are realized, it has turned out that the design and/or learning of such deep hierarchical systems is a very difficult task. Most existing computer vision systems are 'flat' (e.g., having rather simple features - such as SIFT - as input and then applying some kind of SVM learning) and hence cannot make use of the advantages connected to deep hierarchies. Here in particular the generalization capabilities are crucial for any form of cognitive intelligence. As a consequence, we see the issue of establishing deep hierarchies as one major challenge for the establishment of truly cognitive systems.
|
The aim of the workshop is to bring together researchers from vision, robotics, machine learning, artificial intelligence, and neurophysiology to discuss existing obstacles in the design of deep hierarchies, possible solutions as well as perspectives for deep hierarchies in vision and robotics.
A special issue with contributions from the workshop on 'Deep Hierarchies in Vision' in a journal is planned.